最新资讯
- Fei-Fei Li在YC的AI Startup School上的演讲,讨论了空间智能相关概念和发展(视频地址: https://www.youtube.com/watch?v=_PioN-CpOP0)
- 银河通用完成新一轮11亿元融资,创始人王鹤近期接受了关于产业界的访谈(视频地址: https://www.bilibili.com/video/BV1WLgQz8Enk)
- 智元发布灵犀X2-N演示视频(视频地址: https://www.bilibili.com/video/BV1ze3DzHEaz ;备注: 轮足切换的构型、髋部偏移移动至踝部这两个特征值得注意)
- 原PaLM-E团队发布端到端VLA模型Generalist,演示多个双臂操作任务(演示地址: https://generalistai.com/blog.html ;备注: 团队多人有OpenAI, Boston Dynamics, Google相关背景)
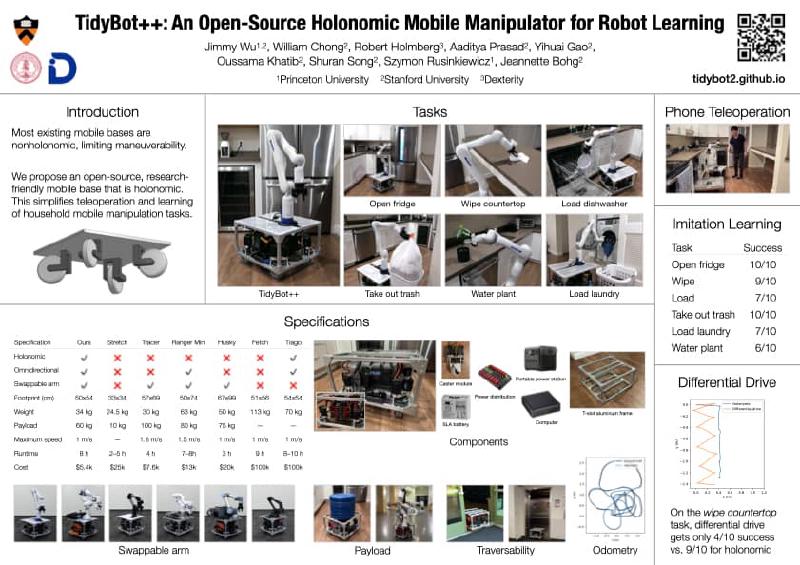
- 普林斯顿大学团队发布开源移动机械手系统 Tidybot++ ,底盘采用四个偏置电动万向轮独立控制,配备手机端遥操作界面(项目地址: https://tidybot2.github.io/)
- CMU团队发布新一代开源灵巧手LEAP Hand V2 Advanced,手掌采用刚柔耦合可折叠设计,用于模拟人手抓握灵活性。成本约 $3000 (项目地址: https://v2-adv.leaphand.com/)
- UCB、Stanford等校团队发布机器人Benchmark项目RoboArena,通过双盲A/B对比评估通用策略适用性,目前可运行7种VLA策略(项目地址: https://robo-arena.github.io/)
- UCLA团队发布并联驱动人形机器人BRUCE,通过MJX仿真器原生模拟闭环运动链约束(文章地址: https://arxiv.org/abs/2507.00273 ;论文一作个人主页: https://yusuke-tanaka.org/project/bruce.html)
- MIT团队发布新型柔顺机器人腕部DexWrist,采用两个阶梯式行星齿轮箱与CubeMars电机驱动解耦的两自由度平行运动机构(项目地址: https://dexwrist.csail.mit.edu/)
- 上海交大团队提出多触觉传感器的校准方案,在仿真及实验中基于GelSlim传感器验证了校准策略的可行性(文章地址: https://journals.sagepub.com/doi/10.1177/02783649241302840)
- 杨硕在CMU的Tairan He的频道的一期访谈,谈论了他近些年在机器人领域的发展与思考(视频地址: https://www.bilibili.com/video/BV1em3XznEFx)
关注的项目
- 一个在网页端录制和回放SO-101机械臂动作的项目(项目地址: https://bambot.org/ ;演示视频: https://www.bilibili.com/video/BV1mWgUz4EKH)
- 一个用飞特电机替代开源灵巧手OCRA原有电机的项目,成本由¥50,000降低至近¥10,000(视频地址: https://www.bilibili.com/video/BV1Zt3xzJEZG)
- 一个将URDF文件转换为 ROS 2 包的Web端工具(项目地址: https://ros2-urdf-web-converter.onrender.com/)
- 一个复刻Robotiq力控夹爪结构的项目,基于达妙6220电机(项目地址: https://github.com/Doonns/fingers-gripper ;演示视频: https://www.bilibili.com/video/BV1fKKqzvE5w)
- 一个定期更新软体机器人项目全流程的YT频道soiboi soft(视频地址: https://www.youtube.com/@soiboisoft)
- 一个基于ESP32-S3的球形自平衡机器人,配备WIFI遥控与FPV视频功能(视频地址: https://www.youtube.com/watch?v=VuBfRYNQgw0)