最新资讯
- Figure AI推出下一代电池F.03,2.3千瓦时支持在峰值性能下运行5小时,相比上一代成本下降78%(博文地址: https://www.figure.ai/news/f-03-battery-development)
- 星际光年预告发布15主动自由度开源灵巧手GAIA Hand,配备上位机软件(演示视频: https://www.bilibili.com/video/BV18BuuzDEx7)
- 2025世界人工智能大会(WAIC)将于7月26-28日在上海浦东世博中心举办(官网地址: https://www.worldaic.com.cn/)
- 上海AI Lab团队发布厨房操作及移动基准数据集MoMa-Kitchen,全流程包括场景生成、可供性标记和物体放置(项目地址: https://momakitchen.github.io/)
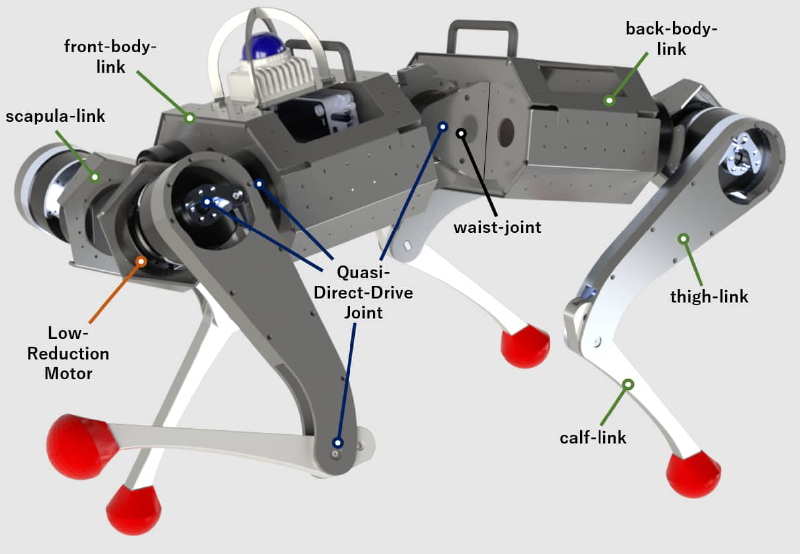
- 东京大学团队推出13自由度四足机器人KLEIYN,腿部设计基于开源四足机器人平台MEVIUS,通过回弹驱动运动实现攀爬功能(项目地址: https://keitayoneda.github.io/kleiyn-chimney-climbing/)
- Hugging Face发布23自由度开源仿生机械臂系统HopeJR,硬件成本约 €500 (项目地址: https://github.com/TheRobotStudio/HOPEJr ;官方文档: https://huggingface.co/docs/lerobot/en/hope_jr)
- RSS2025会议视频录播已上传至官方频道,可供参考(视频地址: https://www.youtube.com/watch?v=qJgmmudGrY8&list=PLG0LjilbrcCYEO5xLaW0lI7lKcTEcLKr7)
- 布朗大学团队发布全身触觉感知方法UniTac,在不添加传感器的情况下通过本体关节内传感器定位接触,定位误差小于8cm(项目地址: https://ivl.cs.brown.edu/research/unitac)
- 上海交大团队提出分层目标条件强化学习框架,提升灵巧手对铰接式工具如镊子与剪刀的操作能力(文章地址: https://arxiv.org/abs/2507.06822)
- 智源研究院团队发布10B级端到端灵巧手抓取模型DexVLG,同时发布语言-视觉-抓取数据集DexGraspNet 3.0(项目地址: https://jiaweihe.com/dexvlg)
关注的项目
- 一个面向采样式模型预测控制的控制与数据采集开源工具箱Judo(项目地址: https://bdaiinstitute.github.io/judo/)
- 一款用于水果采摘的双臂移动机器人,成本约 ¥5000 (项目地址: https://github.com/nomorewzx/PingTi-Arm ;演示视频: https://www.bilibili.com/video/BV1cvubzsEzo)
- 一款开源的端云协同六足机器人,可实现实现自动跟踪射击与网页端远程操控(项目地址: https://github.com/ryhxf/Grounding-DINO-based-device-cloud-collaborative-shooting-robot-spider ;演示视频)
- 一款采用棘轮张紧机构的绳驱滚动接触机器人关节(演示视频: https://www.bilibili.com/video/BV13Hucz8E12 ;项目地址)
- 一则灵足时代介绍RobStride关节基本测试体系的视频,测试项目包含电快速全脉冲、齿槽转矩等(视频地址: https://www.bilibili.com/video/BV1D7ukzVEjL)
- 一篇关于机器人远程操作的调研性博文(文章地址: https://itcanthink.substack.com/p/remote-robotic-teleoperation)
- 一个整理机器人领域核心的100个知识点的项目AI Robotics 100 Questions(项目地址: https://cybernachos.github.io/ai-robotics-100q/outline)
- 一则Y Combinator关于AI时代如何提升个人竞争力的播客(播客地址: https://www.ycombinator.com/library/Me-how-to-spend-your-20s-in-the-ai-era)